Portfolio Details
Project information
Position and orientation determination of a probe. IMU MPU9250 and a STM32F407 ARM microcontroller.
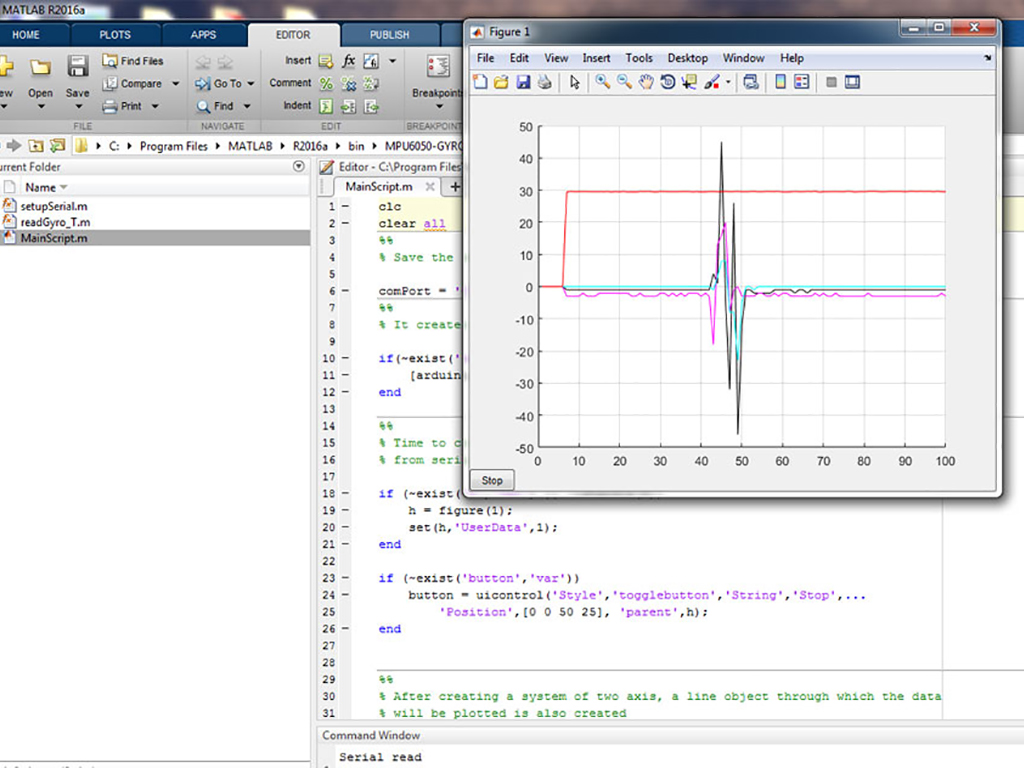
By combining the measurements of the accelerometers, gyroscopes and magnetometer from the Inertial Measurement Unit MPU9250 in a Kalman filter, the orientation of the MPU9250 was determined. The displacement of the MPU9250 was determined by using the trapezoidal integrating method to integrate the acceleration measured with the accelerometers. This displacement was combined with the orientation to determine the position of the MPU9250. With the knowledge of the relative orientation and distance between the MPU9250 and the probe-tip, the orientation and the position of the probe-tip was determined with use of quaternions. Pitch and Roll angles were determined with an accuracy of 2 degrees.